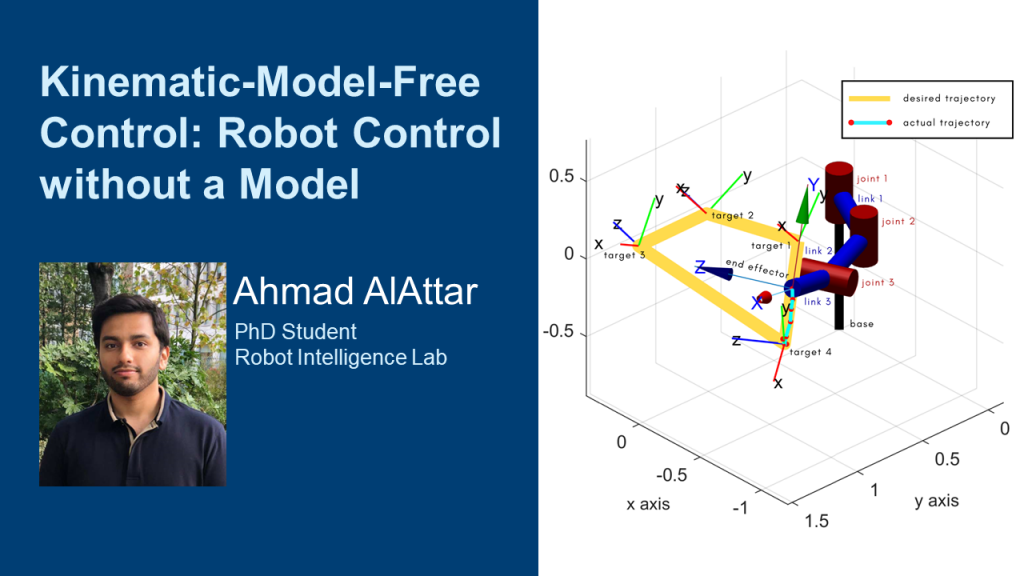
Kinematic-Model-Free Control: Robot Control without a ModelPetar Kormushev3 December 2020 Papers Robot Control Robots Is it possible to control a robot without a model that describes its kinematics? (more…) Read Kinematic-Model-Free Control: Robot Control without a Model in full
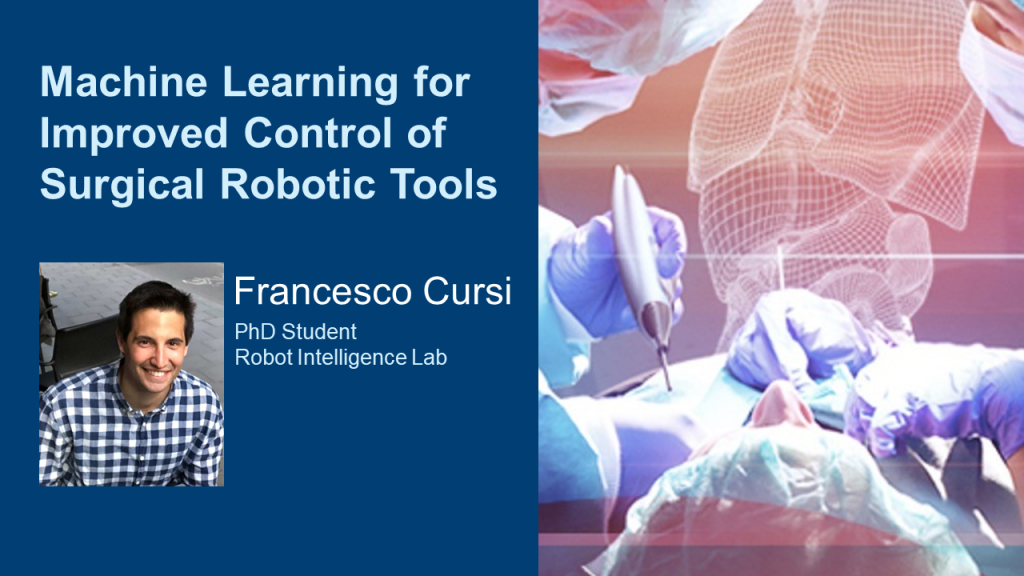
Machine Learning for Improved Control of Surgical Robotic ToolsPetar Kormushev25 September 2020 Papers Machine Learning Robot Control Robots Surgical Robotics Surgical robotic tools face dynamic environments, changing kinematics, and complex tasks. Machine learning can help us overcome these challenges. (more…) Read Machine Learning for Improved Control of Surgical Robotic Tools in full